CN118123837A 基于移动式复合机器人的化学实验室智能操作系统及方法
作者:程沛浩 时间:2024年06月09日 18:40 点击数:
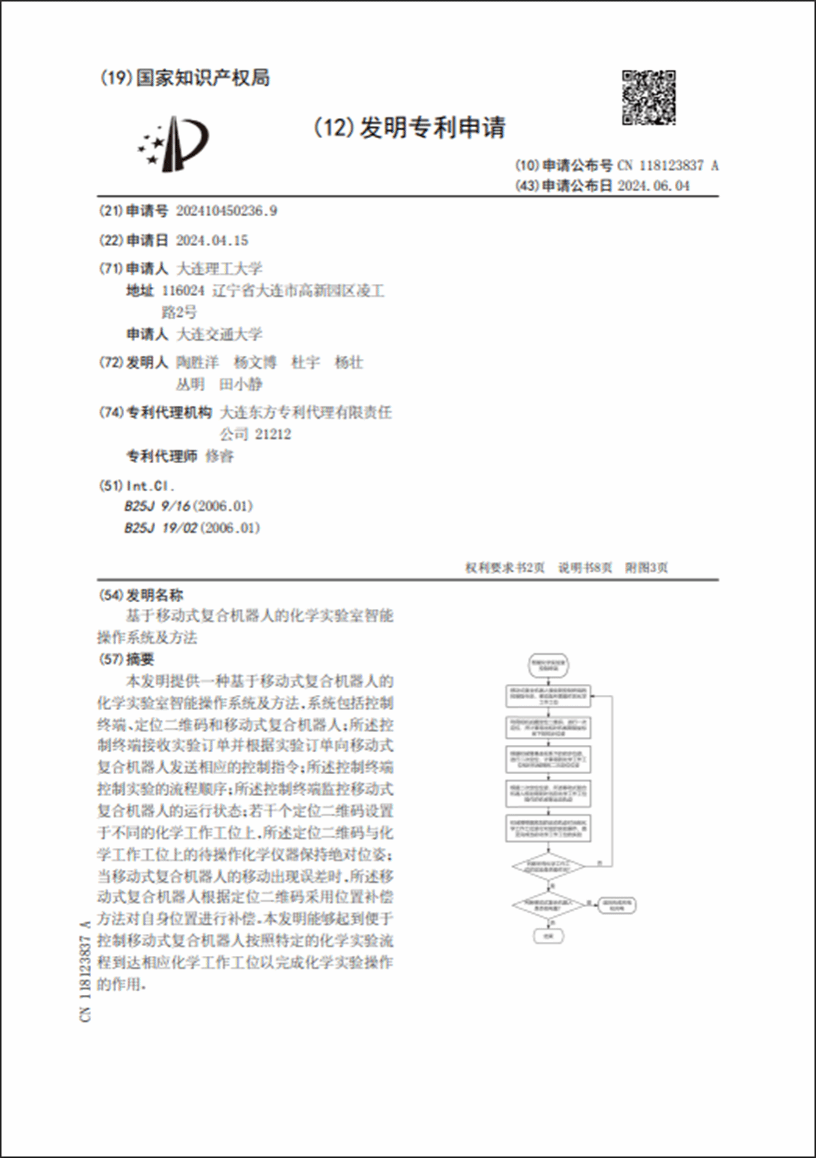
本发明提供一种基于移动式复合机器人的化学实验室智能操作系统及方法,系统包括控制终端、定位二维码和移动式复合机器人;所述控制终端接收实验订单并根据实验订单向移动式复合机器人发送相应的控制指令;所述控制终端控制实验的流程顺序;所述控制终端监控移动式复合机器人的运行状态;若干个定位二维码设置于不同的化学工作工位上,所述定位二维码与化学工作工位上的待操作化学仪器保持绝对位姿;当移动式复合机器人的移动出现误差时,所述移动式复合机器人根据定位二维码采用位置补偿方法对自身位置进行补偿。本发明能够起到便于控制移动式复合机器人按照特定的化学实验流程到达相应化学工作工位以完成化学实验操作的作用。